
Control algorithm
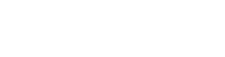
The two classical semi-active control strategies, the skyhook control strategy (SH) and the acceleration-driven damping control strategy (ADD), can complement each other in terms of control effects. The ceiling control strategy has a better control effect in the low frequency band (near the body resonant frequency), while the acceleration-driven damping control has a better control effect in the middle and high frequency band (above the body resonant frequency).
The optimized hybrid skyhook-acceleration-driven damping control algorithm (SH-ADD) uses a simple frequency band selector to identify the transient characteristics of the suspension; in the case of low-frequency vibration, the skyhook control strategy is selected, and the acceleration is selected in other frequency ranges Drive damping control strategy.
In the figure below, the SH-ADD algorithm is compared with other control strategies targeting ride comfort. It can be concluded that the control effect of this algorithm is almost optimal, and it can almost perfectly combine the advantages of skyhook control and acceleration drive damping control. Therefore, its control effect is very close to the lower limit of the frequency response curve. In fact, for body acceleration, it is difficult to find other control algorithms with better control effects.
The main creator of Beijing Keyi International Intelligent Suspension Co., Ltd. created the SH-ADD algorithm and owns the intellectual property rights of the algorithm. The intelligent suspension system of Keyi Company adopts the SH-ADD control algorithm.
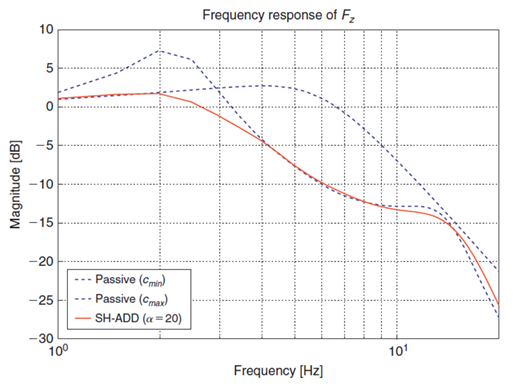
Figure 1. Comparison of SH-ADD algorithm and passive suspension frequency response function - Fz
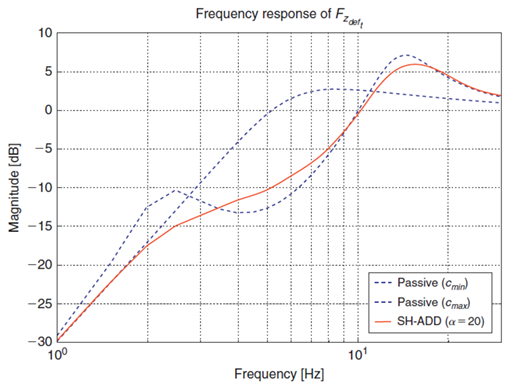
Figure 2. Comparison of SH-ADD algorithm and passive suspension frequency response function - Fzdeft
|
Figure 3. Comparison of normalized performance metrics: Ride comfort metrics - (left histogram) and road adhesion metrics - (right histogram).
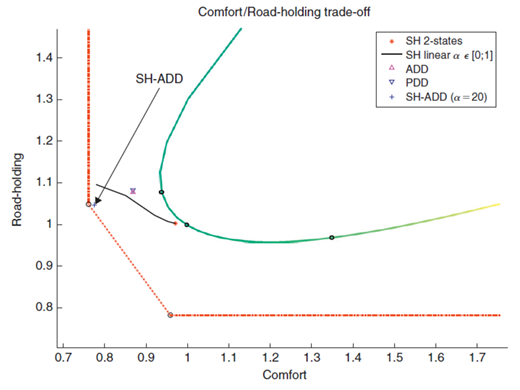
Figure 4. Standardized performance trade-offs between ride comfort-oriented control algorithms and SH-ADD algorithms, compared with passive suspension systems for damping values (solid lines in color change), ride comfort, and road adhesion limits (dashed lines). .