

控制算法
控制算法
天棚控制策略(SH)和加速度驱动阻尼控制策略(ADD)两种经典的半主动控制策略可以在控制效果方面实现互补。天棚控制策略在低频段(在身体共振频率附近)具有较好控制效果,而加速度驱动的阻尼控制在中高频段(高于身体共振频率)控制效果较好。
优化的混合天棚-加速度驱动阻尼控制算法(SH-ADD),利用一个简单频段选择器来辨识悬架的瞬态特性;在低频振动的情况下,选择天棚控制策略,在其他频率范围则选择加速度驱动阻尼控制策略。
下图中,用SH-ADD算法与其他以乘坐舒适性为目标的控制策略进行了比较。可以得出结论,该算法的控制效果几乎是最优的,它几乎能够完美地结合天棚控制和加速度驱动阻尼控制的优点。因此,其控制效果非常接近频率响应曲线的下限。事实上,对于车身加速度而言,很难找到控制效果更好的其他控制算法。
北京科亿国际智能悬架公司的主创人员创立了SH-ADD算法,并拥有该算法的知识产权。科亿公司的智能悬架系统采用了SH-ADD控制算法。
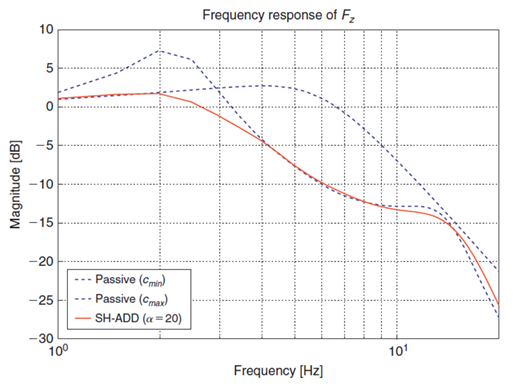
图1. SH-ADD算法与被动悬架频响函数对比-Fz
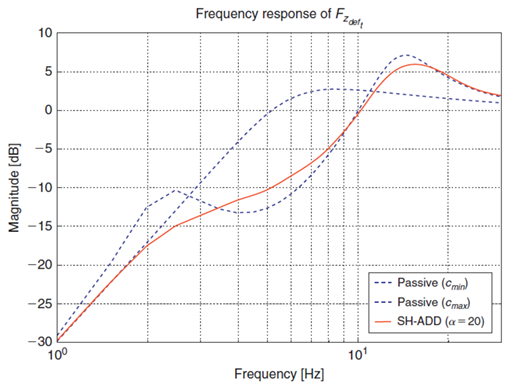
图2. SH-ADD算法与被动悬架频响函数对比-Fzdeft
|
图3. 标准化性能指标比较:乘坐舒适性指标- (左直方图)和路面附着性指标- (右直方图)。
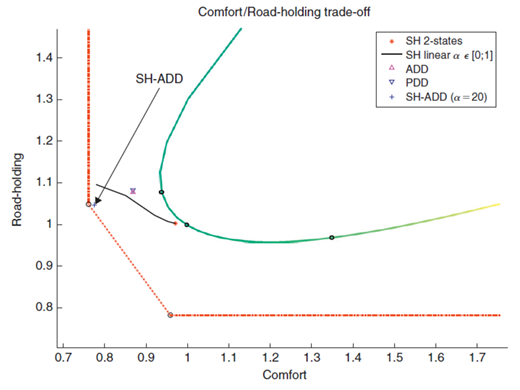
图4. 面向乘坐舒适性的控制算法与SH-ADD算法的标准化性能指标权衡,与阻尼值 (颜色变化的实线)的被动悬架系统、乘坐舒适性及路面附着性极限值(虚线)对比。